

Acoustic positioning systems
Hydroacoustic positioning systems are commonly used to determine the position of an object underwater. These systems usually consist of a transmitting source located on the ROV and a topside unit with an array of transducers to detect the sound signals.
The transponder on the ROV sends out a characteristic ping periodically or upon request from the topside unit. The topside unit can then determine which direction and at what distance the ping is coming from, hence creating an estimate of where the ROV is located.
There is a range of different systems that are typically categorized by the distance between the receiving transducers. We will now go into more detail about two of these systems.
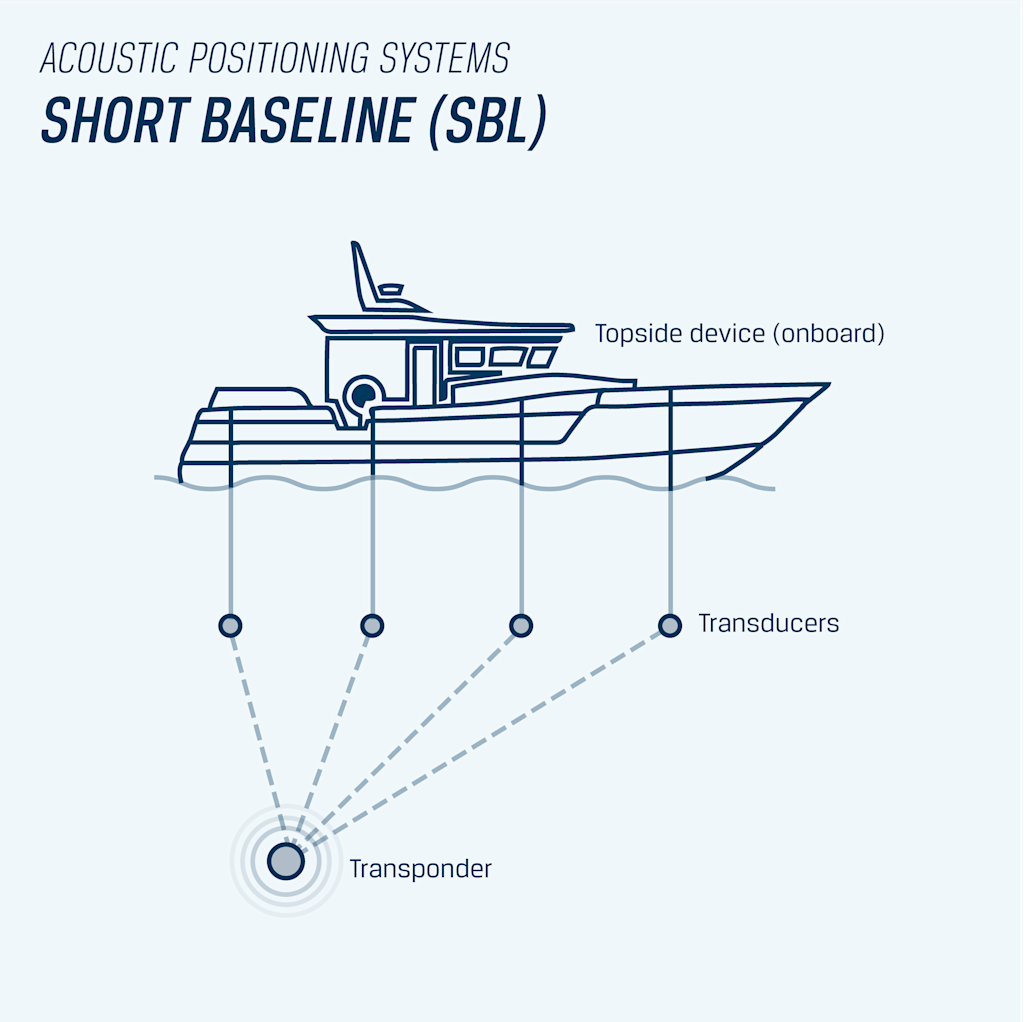
Short Baseline (SBL) Systems: Acoustic positioning systems with a short baseline typically consist of a topside unit with an array of transducers and a transponder that is mounted on the ROV. The transducers can be mounted from about 50 cm to some meters apart. When the transponder sends out a ping, the time of flight is measured for each receiver. Since the speed of sound in water is known (about 1500 m/s), one can calculate the four distances and use trigonometry to determine the ROVs position (in the X, Y plane). The Z component is obtained precisely from a pressure sensor. The ROV's relative position is then added to the antenna's GPS position and rotated due to its heading before the global position (latitude, longitude) is sent back to the ROV via the tether.
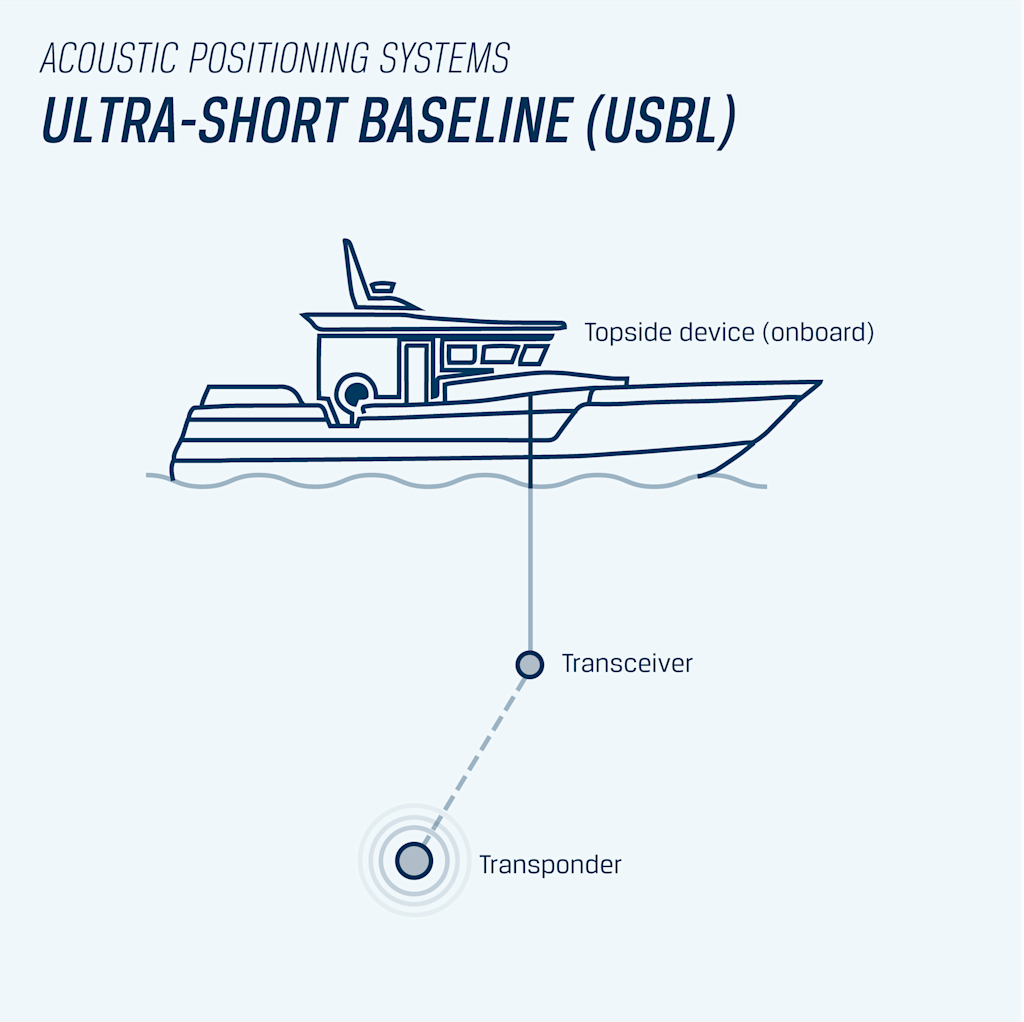
Ultra-short baseline (USBL) systems: The ultra-short baseline systems work similarly to the SBL systems, but instead of having four individual transducers, they are all contained in one unit. The USBL head consists of an array of transducers, which are typically separated by 1-10 cm. By using the phase shift, it is possible to determine which direction the sound is coming from, and by measuring the time of flight, one can estimate the distance.
Why it can be challenging to get an accurate position of what you are tracking
Imagine that you are at an open-air, full symphony concert. Picking out the sound of one particular instrument is a difficult task. You would probably consider the show a bit “noisy.” A symphony concert does indeed sound better in an enclosed auditorium. The same can be envisioned with underwater acoustic positioning systems. In a busy harbor, picking up a positioning beacon within the cacophony of underwater sounds coming from other vessels and echoes from the harbor structures is challenging.
In the harbor scenario, we will get soundwaves reflected from a wall or the seabed, which will indicate a false distance and direction, resulting in a more uncertain position estimate. To mitigate this, advanced filtering must be applied. This filter will only accept a signal with a pressure wave of the proper frequency as an amplitude greater than a set threshold. All signal detection means hearing the “ping.” The “ping” must be of the proper frequency and loud enough to hear (i.e., a signal-to-noise ratio greater than 1).
Water Linked DVL A50
The Water Linked DVL A50 is a sensor that provides velocity (speed and direction) measurements by sending sound waves toward the seafloor and analyzing the echoes. Imagine the siren of an ambulance. You can hear the sirens coming closer to you when the ambulance is approaching, and you can hear the change in pitch when it is driving away from you. This is known as the “Doppler effect”. The DVL transmits an array of typically four sonar beams in a downward direction toward the bottom, with each beam pointing in a different direction. By comparing the pitch of each of the sound beams, it can estimate the velocity of the vehicle relative to the seafloor. With the velocity measurements, it is possible to obtain a position estimate using a dead reckoning algorithm (Kalman filter), fusing all available sensors to obtain the best possible position estimate.
Usage and benefits of the DVL
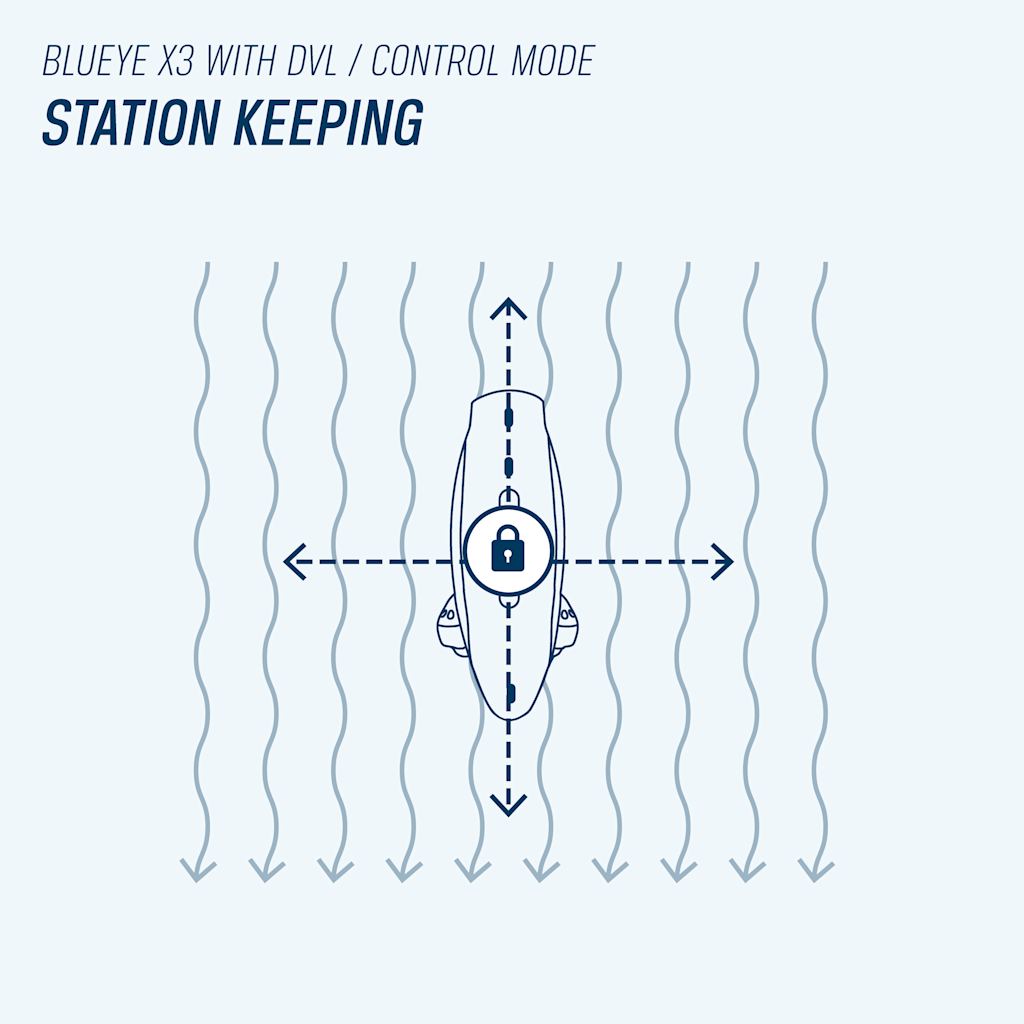
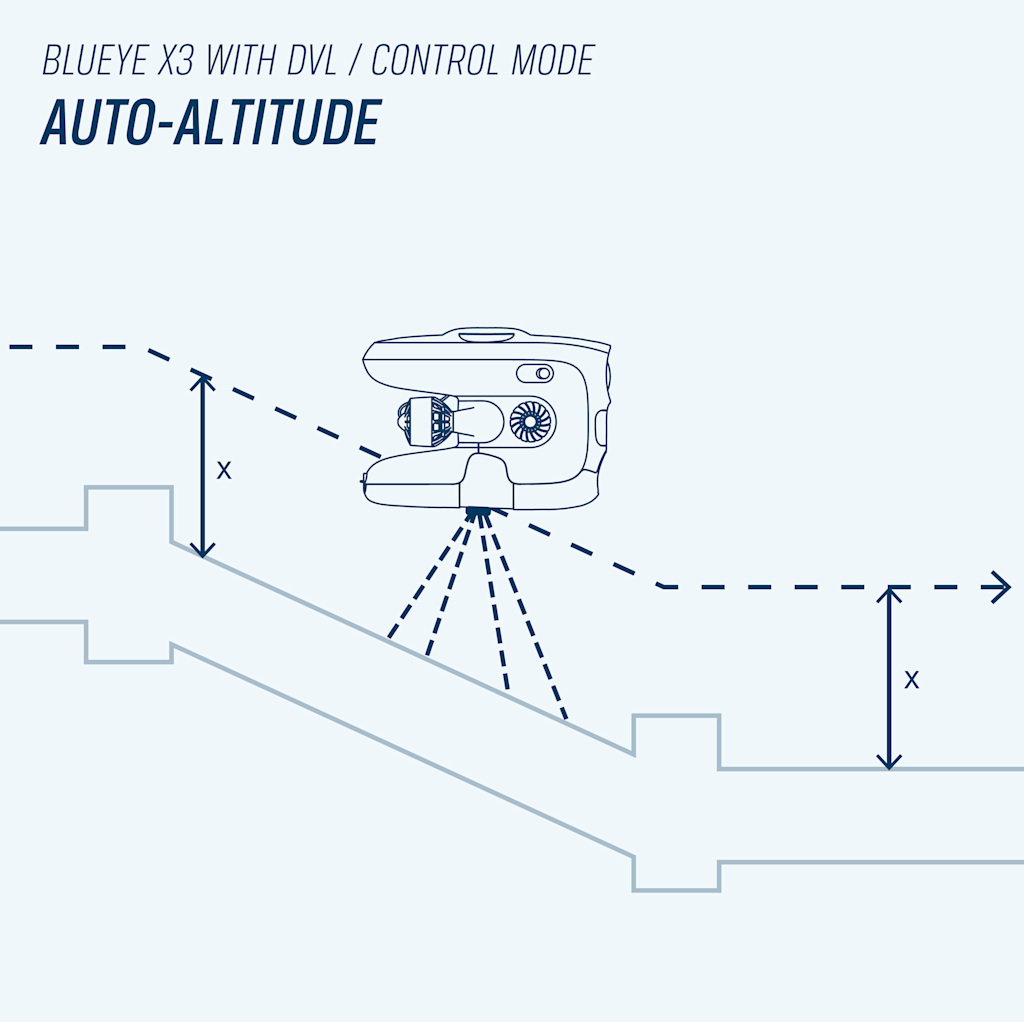
With a DVL mounted on the Blueye ROV, you get a new control mode called station keeping. This feature is excellent for maintaining position in areas where there is current. You also get auto-altitude which allows you to keep a constant distance from the seabed while diving into deeper waters.
The DVL provides a dead-reckoning track that starts from your control device's GPS position (or a known point of interest) and uses the ROVs compass (or manual heading) to rotate the track relative to the North. This removes the need for a line-of-sight from the operator/surface position and the ROV.
The DVL is especially beneficial in operations such as:
- Observation tasks where the ROV must wait at one location for an event to happen.
- Rivers or high-current areas as stationkeeping will free the mental load of manually fighting the current. This increases the quality of the data collected and the chances of succeeding with the job. Once you let go of the sticks, you can easily take a short break or hand it over to someone next to you.
- Non-stationary operations (such as from vessels).
- Use of other external sensors that needs extra stability to measure correctly.
The DVL is easy to use and requires no additional external equipment setup. The stationkeeping feature makes a real difference in controllability for users at all levels. It will also demand less power consumption of the ROV battery as the sensor has a more fine-tuned control over the thruster inputs.
The DVL provides high precision estimates but potentially low accuracy depending on the initially captured heading. Since the DVL uses dead-reckoning to create a track, the position estimates will drift over time. It is recommended to resurface the ROV every 15-20 minutes and reset the position starting point, to minimize the error in the position (due to the accumulated drift).
Live position at the surface with the Blueye GPS
When you are inspecting underwater environments, knowing exactly where you are is critical. With the Blueye GPS you can track and log positions in real time, so you always know where the data was collected. Furthermore, you can tag points of interests directly in the Blueye app using mission planning, making it easier to organize and revisit findings. The Blueye GPS is designed for documenting underwater findings with precision and streamline mission workflows - whether you are surveying coastal structures, inspecting ports, or monitoring marine environments.
Combining the Blueye GPS with a DVL
For operators who require high precision, the Blueye GPS can be paired with the WaterLinked DVL A50. Additionally, both sensors can be combined on a single Guest Port, freeing up space for additional payloads. By using the latest known GPS position as a reference, the system ensures accurate positioning throughout the dive. Once the ROV resurfaces, the position data seamlessly converges back to the GPS reference, minimizing drift and enhancing operational efficiency.
Detailed navigation data directly in the Blueye App
The sensor integrations with the Blueye software provide the operator with accurate position data in the Blueye App. You’ll find detailed navigation data and a map showing the ROV’s live position track in the navigation menu.
A list with Points of Interest can be imported before the dive, making finding your object of interest easier. Add new points while diving as well. Several charts are also available for offline use in areas with no cellular connection.
Post-processing and documentation of the data
A KML or KMZ file is easily extracted from the dive log in the Blueye App. These files can be displayed directly on Google Earth or any other GIS tool. Utilizing position log files will significantly improve your workflow when creating post-dive reports. They are also very beneficial if you want to revisit any points of interest or successively explore an area. You can load tracks from different dives into the same map to get a good visual overview. The position data will also be available as metadata in the photos you capture using your ROV.
Find and download example files at the bottom of this article.
Get the best of both worlds - combine the USBL and DVL
You can combine a USBL and a DVL with the Blueye X3 ROV. Once the two sensors are connected to the ROV, they will automatically be included in the observer algorithm and fused together to create an improved, non-drifting position estimate. The DVL reduces the jumps in the position measurements from the USBL, whereas the USBL corrects for the long-term drift of the DVL.
The experience in the Blueye App and in the logs will be the same but with increased accuracy and precision on the position estimate. The additional control modes provided by the DVL will also be easily available. It's a killer combination!
Future developments for positioning sensors
The sensors mentioned in this article are just a couple of options we've developed integrations for. Several other great sensors are also compatible with the Blueye system, and we're constantly testing what's available to expand our offering. Some other suitable sensors to mention are the Kongsberg MicroPap USBL system from Kongsberg and Micro Ranger 2 from Sonardyne.
We're also continuously developing new software in the Blueye App, allowing new features based on input from the different sensors. New navigation features such as "mission planning," "return to home," and "go to depth" will become available through free software updates soon.
Example position track in KMZ (Google Earth)
An example position track from a pipe inspection in Korsvika.- Format
- application/zip
- File size
- 3.56 MB
Example position track in KML
Example file for position data that can be opened in Google My Maps, or any other GIS tool.- Format
- application/vnd.google-earth.kml+xml
- File size
- 0.27 MB








