

What is a DVL and how does it work?
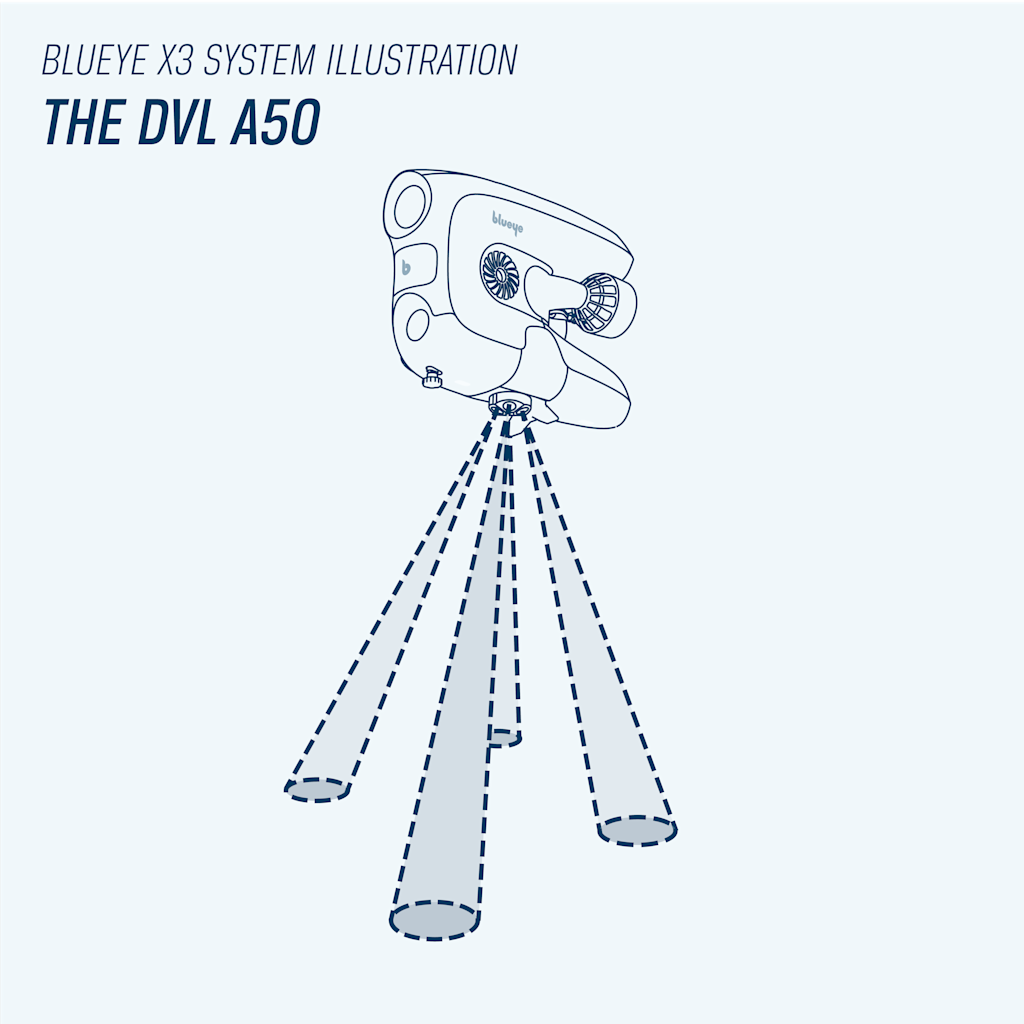
A Doppler Velocity Logger (DVL) is a sensor that provides velocity (speed and direction) measurements by sending sound waves towards the sea bottom and analyzing the echoes. Imagine the siren of an ambulance. You can hear the sirens coming closer to you when the ambulance is approaching, and you can hear it when it is driving further away from you. This is known as the “Doppler effect”. The DVL transmits an array of typically four sonar beams in a downward direction toward the bottom, with each beam pointing in a different direction. By comparing the pitch of each of the sound beams, it can estimate the velocity of the vehicle relative to the seafloor.
When a starting point, a compass heading and the velocity is known, it is also possible to estimate the position of the vehicle with the use of an “state observer”. This process is also known as “Dead reckoning”.
DVLs are used in many different applications. Military divers use swim boards to accurately navigate underwater. These boards typically feature a compass and a depth sensor, to guide the diver underway. With a DVL mounted on a swim board, the diver can track how far she has swum, where she is, and how she can find her way back to her starting point. The DVL can also track where she has been diving and mark points of interest (POI).
Autonomous underwater vehicles (AUVs) run autonomously and are thus unmanned. On these vehicles, a DVL is a critical component for navigation, especially when global position data (a GPS or an acoustic positioning system) is not available. The DVL is typically used in combination with a global positioning system and an IMU (Inertial Measurement Unit) to obtain the best possible estimate of its velocity and position.
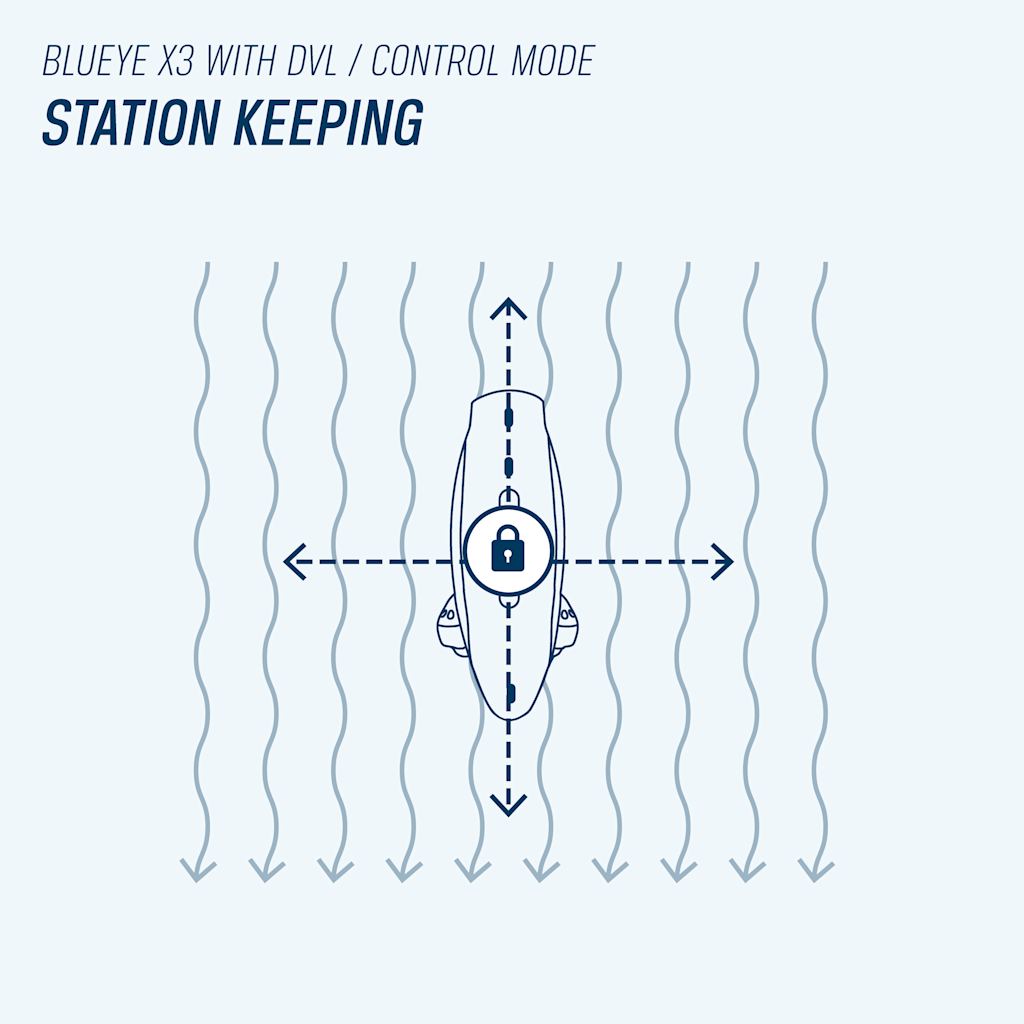
Introducing station keeping and auto-altitude
When the position and velocity of the drone is known, it is possible for the control system to automatically maintain a desired position with a new control mode called station keeping.
This mode simplifies inspections and monitoring by keeping the ROV locked in one place using the sea bottom as a reference, even when ocean currents or other external forces are acting on the vehicle. Simply push one button on the controller, and the ROV holds the chosen position without user input to the controller. You can also move like normal to a new location, and once you let go of the sticks, it will automatically lock to the new current position seamlessly. Station keeping will of course greatly reduce the complexity of operating the ROV and allow the pilot to focus on capturing high quality data.
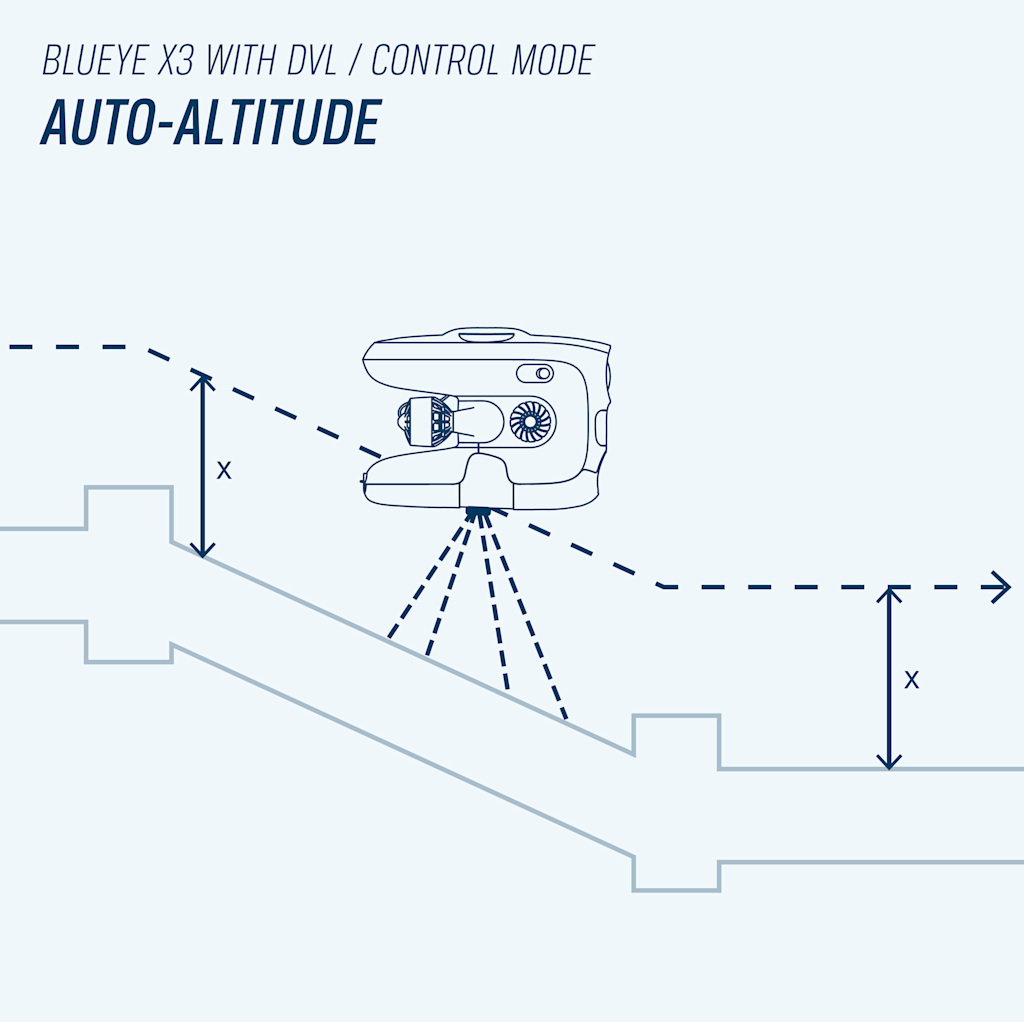
The DVL also provides an altitude measurement. This enables another new control mode called auto-altitude. The mode works exactly as the auto-depth mode and enables you to maintain a desired distance to the seabed while diving at different depths. This is especially useful if you were to follow a pipeline from the shallow to the deep. This feature alone is also available with the Ping Sonar Altimeter and Echosounder from Blue Robotics as a more affordable option.
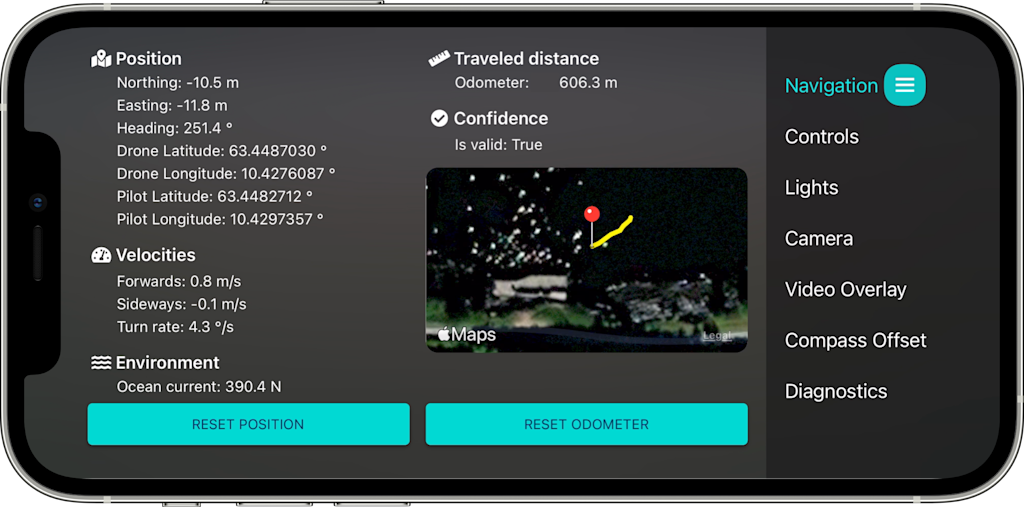
Since we integrate all external equipment with our Blueye Smart Connectors, the ROV will instantly recognize the DVL’s or the Ping Sonar's presence and appear in the Blueye App with its available features. There is no need for you to do any configuration. You may also find a new tab under navigation settings, with detailed diagnostics and a map showing the location of both the pilot and the ROV. This is to make sure you have a good starting point for the dead reckoning position estimate.
Display your dive on a map with georeferenced images
The position track from your dive can easily be extracted from the dive log into a KML or KMZ file and displayed directly in Google Earth or any other GIS tool you may prefer. The KML format is a lightweight XML file that holds the position track of the ROV along with POI pins from where you changed the video overlay title and subtitle. The KMZ has the same information as the KML, but it also stores the images captured during the dive, allowing you to automatically display the images at the correct location on the map. These position log files significantly improve the workflow when creating the report for the inspection. Now you can see immediately where your findings were on the map. These dive tracks are also great to use if you want to get back to a point of interest (POI), or if you are successively exploring an area. You can then load tracks from different dives into the same map to get a good visual overview. These maps can also be shared easily with colleagues or third parties.
All images captured on the ROV will also be georeferenced automatically, meaning that you can open the image in your Photos library on the phone and see the location of where the image was taken right away.
Situations where a DVL will drastically simplify ROV operations
- Observation tasks where the ROV must wait at one location for an event to happen.
- Observing divers during a demanding operation.
- Monitoring the fish's health during a delousing operation.
- Inspections of larger or longer structures. Know where the images were captured with automatic geotagging.
- In areas with current, station keeping will free the mental load of manually fighting the current. This increases the quality of the data collected and the chances of succeeding with the job.
- Strong current and challenging environment. Once you let go of the sticks, you can easily take a short break or hand it over to someone next to you.
- Search off areas, knowing where you are, and where you have been.
- In general, helping the ROV pilot understand where the vehicle is located at all times.
- Inspections where you need to know where the images were taken.
We have tested the DVL inside of a fish pen. When the ROV approached the net by 6-8 meters the DVL was surprisingly able to recognize the net and locked its position relative to the net, instead of the seafloor. This opens for using a DVL inside fish pens as well. - Andreas Viggen, Senior Software Engineer
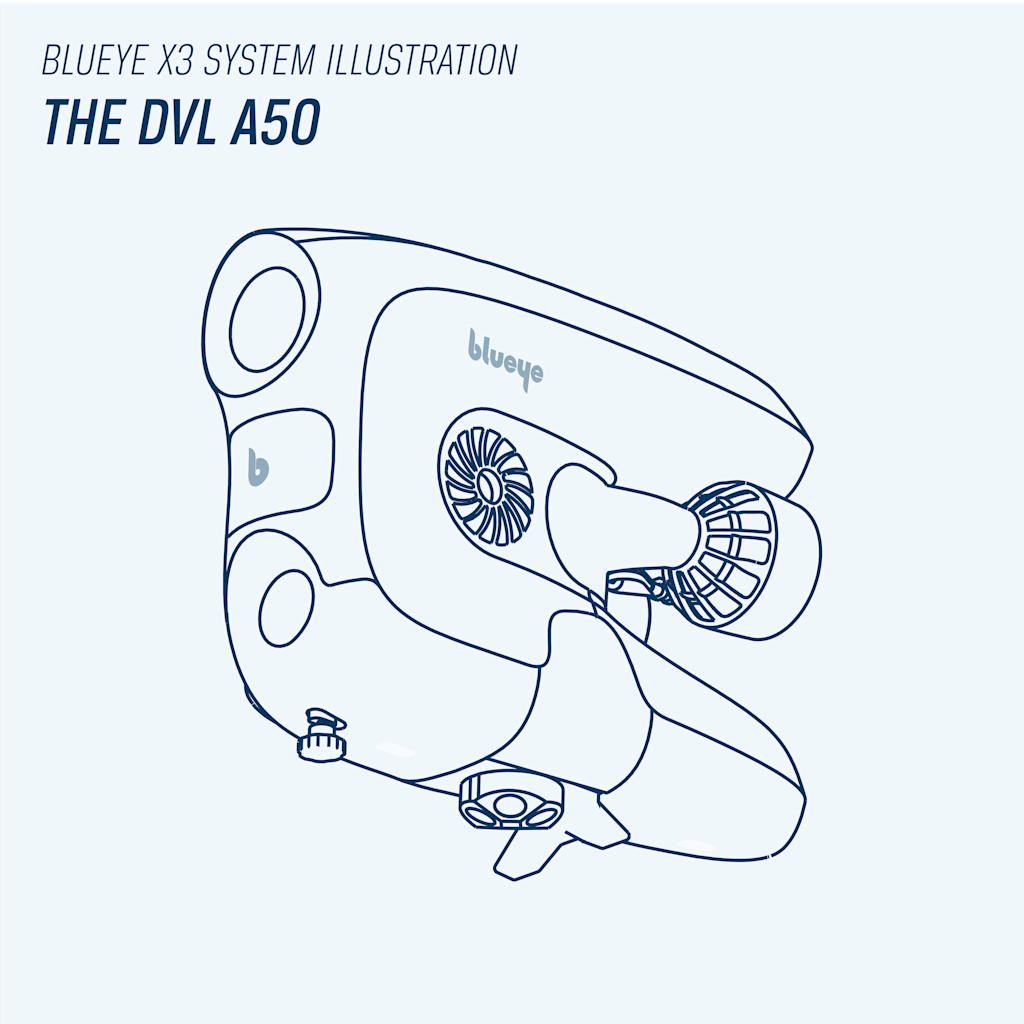
The world’s smallest DVL – developed by the Norwegian company Water Linked
Traditional DVLs are usually large, clumpy, and difficult to use on smaller ROVs. It is specifically the physical size of the Water Linked DVL A50 making the unit unique, in addition to the low price point. The small size is important for keeping the good maneuverability of the blueye ROVs. A larger unit would need additional buoyancy, which again would lead to added drag in the water. Its flat formfactor is also very unique, and makes it feasible to mount underneath the Blueye X3.

The A50 DVL from Water Linked is integrated both in software and hardware of the Blueye X3. The integration allows you to plug the DVL into the X3 using the Blueye Smart Connector into one of the three Guest Ports offered. The Blunux operating system will start the necessary drivers automatically and send the signals to the control system and the Blueye App to recognize the connected equipment.
This is exactly what we are trying to do; we take the difficult tasks and find the right sensors that might sound very technical and make them super user-friendly in our system. You can pick up any aerial drone, get them up in the air, leave the joystick and it will stay there. This is what we have made possible for ROVs as well by integrating the DVL. - Andreas Viggen, Senior Software Developer
Example position track in KMZ (Google Earth)
An example position track from a pipe inspection in Korsvika.- Format
- application/zip
- File size
- 3.56 MB
Example position track in KML
Example file for position data that can be opened in Google My Maps, or any other GIS tool.- Format
- application/vnd.google-earth.kml+xml
- File size
- 0.27 MB



