

What is a sonar and how do they work?
Sonar is an acronym for Sound Navigation And Ranging. Sonar technology has been used in most marine and aquatic industries for decades. This tech is integrated into a wide range of products. Some sonars are as simple as the echo sounders used on fishing vessels to locate fish. However, some are highly advanced and are used in highly specialized navigation or even threat detection by military vessels.
Most sonars, though complex, can be explained simply; you make a noise, or a sound wave, going out from your position, and depending on the time and strength of echoes returning to your position, you can determine how far away you are located from something. For some types of sonars, one can also determine how big, thick, or what kind of items are around you since some materials reflect sound more than others.
What are underwater sonars used for?
There are limitless use-cases for sonar, but we will focus on the (3) we see most:
- Collect data such as seabed mapping or imaging of items underwater
- Underwater navigation in less than ideal visibility or at long distances
- Locate or search for items or missing persons
Scientists and researchers typically use sonars to map the seabed. They collect data to provide information on protecting and managing life and assets below the surface. The ROV is often essential to understanding the collected sonar data since its camera records real-time video and images. These images and sonar data give a more complete picture.
Underwater navigation is vastly different than navigation above the surface. The ocean space can be dark, affected by particles in the water creating low visibility, and is generally an unknown space for humans. Sonars make it easier for ROV operators to understand where the ROV is located relative to the items discovered. Properly integrated sonars can extend your vision dramatically, provide detailed location information, and make navigation much simpler.
Closely related to underwater navigation is the use-case of search and rescue. Sonars are often used to locate or search for items or missing persons. As sonars reflect echoes from objects far beyond what a camera can capture, a tool like this on an ROV naturally helps search operations.

Two main categories for underwater sonars: active and passive
Sonars are generally categorized as either active or passive. Passive sonar uses listening only to detect noise from marine objects such as ships and marine animals. These types of sonars are popular for military vessels and scientist missions that concentrate on “listening” to the ocean. Active sonars send out an acoustic signal and then listen for a reflection (echo) of that signal. It’s the active type of sonars that are mounted on ROVs as they can be used to provide depth indications, object imaging, and aid in navigation.
Active sonar systems make use of beam-forming, frequency shifting, and backscatter analysis to characterize targets insonified. - Christ and Wernli Sr (2007)
Active Sonar Systems: Single- versus multi-beam
According to Christ and Werli Sr (2007, p. 401), active sonar systems used on ROVs generally fall into three categories:
- Multibeam
- Mechanically or side-scanning sonar (single-beam)
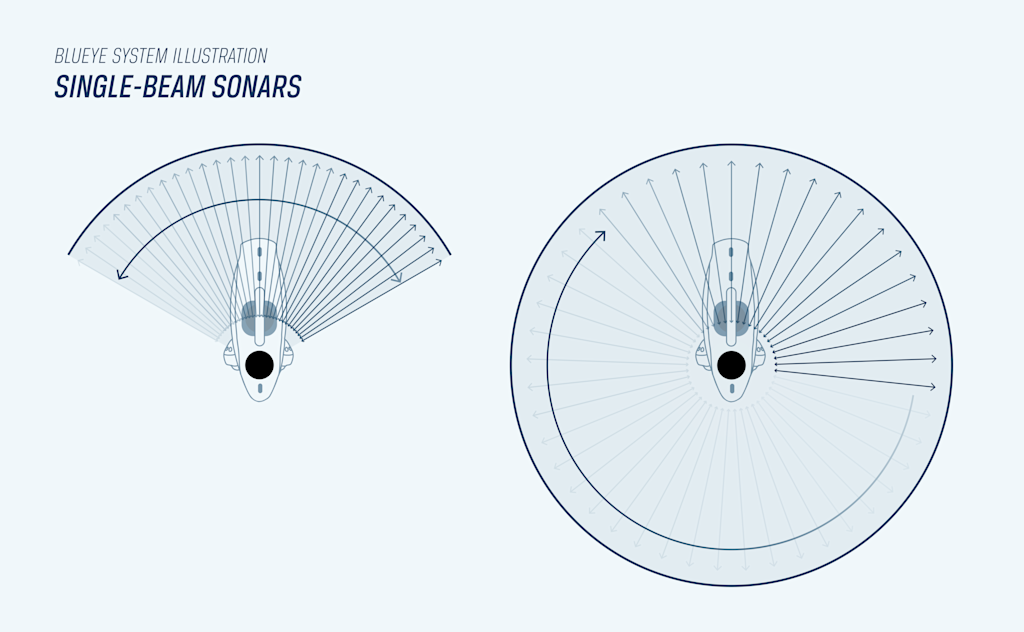
- Single-beam directional sonar
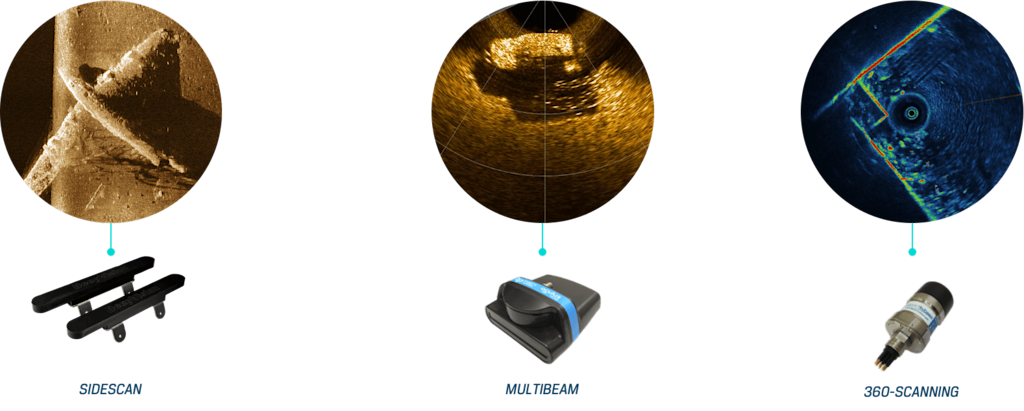
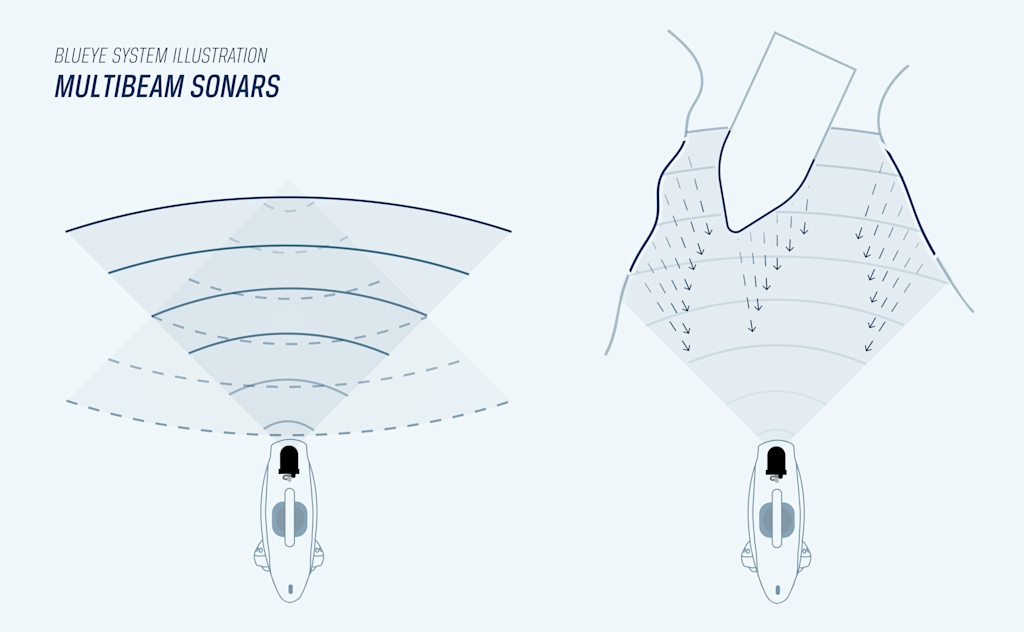
Single-beam sonars use one pulse with one reception on a single receiving element. These systems are popular on the market today because of their simplicity and low cost and are popular for mapping larger seafloor areas. On the other hand, Multibeam transmits one wide pulse in a fan-shaped pattern and receives the backscatter (sound energy bouncing or reflecting off items or surfaces) on a large number of receiving elements on a detailed level that provides a quick image generation. It collects data on both seafloor depth and backscatter. Multibeam is especially useful for imaging details on structures below the surface and acts as the ROV operator viewing tool.
| Single-beam | Multibeam | |
|---|---|---|
| View 360° around the ROV | Yes | - |
| Power needed | Low | High |
| Image generation | Standard | Premium |
| Price point |
The difference between imaging- and profiling sonar systems
Imaging sonars have a fan-shaped sonar beam that scans a given area by either rotating or moving in a straight line. An ROV operator using an imaging sonar should be able to recognize sizes, shapes, and surfaces reflecting characteristics of the chosen target. The primary purpose of the imaging sonar is to act as a viewing tool (Christ and Wernli Sr, 2007, p. 404).
Profiling sonars use a narrow pencil-shaped sonar beam to scan across the surface of a given area, generating a single profile line on the display monitor. This line, consisting of a few thousand points, accurately describes the cross-section of the targeted area (Christ and Wernli Sr, 2007, p. 405). The primary purpose of profiling sonars is often to measure the depth or for creating sea bottom characterization. One can utilize both imaging and profiling sonars on one ROV to accomplish both imaging and altitude measurements (distance from bottom).
What type of sonar should I choose?
There are quite a few factors to consider when choosing the correct sonar for your ROV. When selecting, remember to keep in mind your use case, your prior knowledge, and your budget. The differences in sonar models can be compared to the differences in cameras. Simple technology can be quite cost-effective and intuitive to operate, while advanced imaging will require a more significant investment and a higher degree of operational competence.
Operating a point and shoot camera is easy but may not produce the desired outcome. Using a DSLR is more complex, but with the right training, will produce vastly superior pictures.The barrier to utilizing any advanced system’s full potential can be high, and in many situations, extensive knowledge on use and technology is needed. Remember to consider the learning curve associated with the sonar device you choose for your ROV.
Before deciding on a sonar system, it's important to properly review your use case(s) and not just go for the “best available” equipment. If you need a sonar to map or scan a larger area, to locate an object, or do seabed mappings, a 360-degree scanning sonar would likely fit your needs. However, a multibeam is probably the best option for use cases where image details are extremely important, or for navigation in real time.
The list of sonars is long, their cost varies greatly, and the technology ranges from simple to very complex. It is your job as the client/operator to find the device that best fits your needs. We at Blueye have a proven track record of helping our clients select the right tools to get the job done, and we would like to help you too. Please get in touch with us if you would like to know more about how sonar technology can assist your business. We are here to help.

Applications for ROV sonars
- Create 3D renderings of structures and inspect material integrity in detail
- Geophysical research
- Bathymetry and item location
- Mapping seabed
- Locate lost or missing objects
- Increase the visual range for search and rescue missions
- Easier maneuvering of ROV in murky waters
- Material identification
Sonars available with the Blueye X3 ROV
360 degree mechanical sonars
ISS360 Imaging Sonar from Impact Subsea
The ISS360 Imaging Sonar provides excellent image clarity with a range capability of up to 90 meters. As a very compact imaging sonar, the ISS360 is ideal for navigation, obstacle avoidance, and target identification sonar.
Multibeam sonars
Oculus M750d from Blueprint Subsea
The Oculus M750d is a dual-frequency multibeam sonar designed for general-purpose underwater imaging. It operates at 750kHz and 1.2MHz, providing users the flexibility to scan wide areas with up to 120 meters range at lower frequency, or gain highly detailed imagery at closer ranges of up to 40 meters. The sonar features a wide horizontal field of view of 130°, making it ideal for obstacle avoidance, navigation, and situational awareness. Integrated tilt control via the Blueye App enables vertical beam steering between -30° and +30°, enhancing usability in various underwater scenarios.
Oculus M1200d from Blueprint Subsea
Optimized for high-resolution inspection tasks, the M1200d offers dual-frequency operation at 1.2MHz and 2.1MHz. It delivers sharp, detailed imaging at short ranges, with a maximum reach of 40 meters at lower frequency and 10 meters at higher frequency. The sonar's horizontal beam aperture is 130° and 60° respectively, while vertical aperture is 20° and 12°, providing a balanced combination of coverage and precision. With Blueye tilt control support, the M1200d is ideal for operations requiring detailed inspections of structures, equipment, or marine life.
Oculus M3000d from Blueprint Subsea
The Oculus M3000d is engineered for ultra high-resolution close-range imaging, operating at frequencies of 1.2MHz and 3.0MHz. With maximum ranges of 30 meters and 5 meters respectively, it is well-suited for highly detailed inspections where precision is paramount. The sonar respectively features 130° and 40° horizontal beam and a consistent 20° vertical aperture. Its real-time imaging capabilities and fine resolution allow users to identify small features and conduct accurate surveys in tight or complex underwater environments. Integrated tilt control ensures ease of use and optimal scanning coverage with the ROV.
Oculus C550d from Blueprint Subsea
Built for extended-range applications, the C550d offers dual-frequency operation at 550kHz and 820kHz, reaching up to 100 meters and 30 meters respectively. It combines a wide horizontal aperture of 120° and 90°, with a 20° vertical field of view, making it suitable for broader area surveys and detection of larger objects or structures. This sonar is a versatile choice for users needing longer range visibility while maintaining imaging clarity. Like other Oculus models, tilt control is available via the Blueye app, providing flexibility in different survey configurations.
Oculus M370 from Blueprint Subsea
The Oculus M370s is a single-frequency multibeam sonar designed for underwater navigation and object identification. Operating at 375 kHz, it offers a range of up to 200 meters. With a 130° horizontal and 20° vertical field of view, it’s well-suited for missions requiring wide coverage and orientation, such as long-range navigation.
The sonar image is displayed directly in the Blueye app, where you can adjust range and sensitivity, measure objects, capture images or video, and export data. Sonar tilt control from –30° to 30° is handled within the app, offering flexibility across different underwater tasks.
The Tritech Micron Gemini is one of the smallest multibeam sonars on the market, specifically engineered for compact ROVs where space and weight are limited. It features a 90° horizontal field of view, a maximum range of 50 meters, and a rapid update rate of up to 20Hz. These characteristics allow for real-time imaging in constrained or cluttered environments. With low power consumption and robust performance, the Micron Gemini is ideal for inspection, navigation, and object recognition in areas where larger sonars may be impractical.
Electronically scanning imaging sonars
Cerulean Omniscan 450 Compact Imaging Sonar
The Cerulean Omniscan 450 Compact is a lightweight, real-time imaging sonar providing full 360° coverage with a scanning rate of up to 20Hz at short ranges. With a nominal frequency of 450kHz and maximum range of 100 meters, it enables precise navigation, localization, and situational awareness in low-visibility environments. The 1.1° beam width and 15° vertical beam angle allow for fine detail imaging while maintaining a compact form factor that integrates well with the ROV. Its size and performance make it well-suited for tasks such as navigation through cluttered areas, object detection, and environmental monitoring.
Cerulean Omniscan 450 Dual Side-scan Sonar
An enhanced version of the Compact model, the Omniscan 450 SS extends the maximum range to 150 meters and offers a narrower beam width of just 0.5°, enabling higher precision imaging at longer distances. Operating at 450kHz and a beam height angle of 50°, it’s designed for users who require improved detail and scanning accuracy over broader areas. With its real-time scanning capabilities and compact design, this sonar is ideal for infrastructure inspection, target tracking, and situational awareness at greater depths, with a rated depth of 300 meters.
Profiling sonars
The 831L Pipe Profiling Sonar is purpose-built for detailed inspection of pipe interiors and tunnel-like environments. Operating at a frequency of 2.25 MHz, it delivers a sub-millimeter range resolution of 0.5 mm, enabling the creation of high-precision 2D slices or 3D reconstructions of internal structures. With a minimum detectable range of just 50 mm and a depth rating of 1000 meters, the sonar is particularly suited for confined space mapping and integrity assessment in challenging industrial applications. When mounted on a neutrally buoyant skid with the ROV, the system maintains maneuverability while delivering robust pipe profiling capabilities.
Echosounders and Altimeter
Ping Sonar Echosounder & Altimeter
This compact sonar module provides accurate distance measurement to the seafloor or nearby objects, functioning as both an echosounder and altimeter. Operating at 115kHz with a beam width of 30°, it delivers reliable performance up to 70 meters with a typical usable range around 50 meters. With a range resolution of 0.5% of the measured distance, it helps ROV pilots maintain stable altitude, avoid collisions, and collect topographical data in both shallow and deeper water scenarios. Its low power consumption and lightweight build make it an excellent fit for integration with the Blueye X3 ROV for general navigation and altitude-holding tasks.
Sources:
Robert D. Christ and Robert L. Wernli Sr., The ROV Manual (2007), 2nd Edition.
Micron Gemini Tritech International Ltd
Ping 360 Sonar Blue Robotics
ISS360 Impact Subsea










